
Why would one want to generalize notions such as convergence and continuity to a setting even more abstract than metric spaces?
Topology deals with the relative position of objects to each other and their features. It is not about their concrete length, volume, and so on. Hence, topological features will not change if continuous transformations are applied to these objects. That is, topological features are preserved under stretching, squeezing, bending, and so on but they are not preserved under non-continuous transformations such as tearing apart, cutting and so on. Objects such as a circle, a rectangle and a triangle are from a topological point of view “equal” / homeomorphic even though the shapes are geometrically rather different.
What features are therefore of interest such that it is worth studying topology?

Assume that  is a closed curve, i.e. a circle, a rectangle, a triangle or something like we can see in the graph above. As long as we transform a shape in a continuous fashion, the relative positions of the points
is a closed curve, i.e. a circle, a rectangle, a triangle or something like we can see in the graph above. As long as we transform a shape in a continuous fashion, the relative positions of the points  and
and  will be similar: for instance, points that have been inside of will still be inside after the continuous transformation. Points that have been on the boundary will still be on the boundary.
will be similar: for instance, points that have been inside of will still be inside after the continuous transformation. Points that have been on the boundary will still be on the boundary.
Hence, the generalization of continuity and the concept of convergence (i.e. points being ‘close to each other’) are the two most characterizing features in topological spaces.
However, convergence and continuity in a metric space  were based on a notion of a distance function
were based on a notion of a distance function  for points
for points  . Set-theoretic topology generalizes the features of topological metric space and ought to be based on an axiomatized notion of “closeness“.
. Set-theoretic topology generalizes the features of topological metric space and ought to be based on an axiomatized notion of “closeness“.
This post is based on the literature [1] to [5]. For English-speaking beginners, [5] is recommended. The German lecture notes [3] is also a good introduction to topology.
Contents
Topology on a Set
The term “topology on a set” is based on an axiomatic description of so-called “open sets” with respect to some set-theoretic operators. It will turn out, that a topology is a set that has just enough structure to meaningful speak of convergence and continuous functions on it.
Open Sets
Definition 1.1 (Topological Space)
A topological space is a pair  , where
, where  is a set and
is a set and  is a family of subsets that satisfies
is a family of subsets that satisfies
(i)  ;
;
(ii)  if
if  for an arbitrary index set
for an arbitrary index set  ;
;
(iii)  if for a finite index set
if for a finite index set  .
.

Let — short — be a topological space in this post.
The following video provides a rather unorthodox way of thinking about a topology. However, it might help to get a heuristic understanding. The connection between metrics and topologies is also mentioned.
Some examples will further support the understanding.
Example 1.1 (Topologies)
(a) Let be a set and  then
then  is the so-called trivial, chaotic or indiscrete topology. The only open sets of the trivial topology are
is the so-called trivial, chaotic or indiscrete topology. The only open sets of the trivial topology are  and .
and .
(b) The power set  of a set is the so-called discrete topology. In this topology every subset is open.
of a set is the so-called discrete topology. In this topology every subset is open.
(c) There are four topologies on the set  , i.e.
, i.e.  ,
,  ,
,  ,
,  .
.
It is still an open problem, which is related to combinatorics and lattice theory, to find a simple formula for the number of topologies on a finite set.
(d) Let be a topological space, and let  . The relative topology on
. The relative topology on  (or the topology inherited from ) is the collection
(or the topology inherited from ) is the collection

of subsets of . It is clearly a topology on . The space  is then called a subspace of .
is then called a subspace of .
(e) Let be a non-empty infinite set and  be the family of open sets. Then
be the family of open sets. Then  is the so-called finite complement topology. First note, that an element
is the so-called finite complement topology. First note, that an element  ,
,  is of infinite cardinality. Think about what happens if we remove finitely many elements from an infinite set.
is of infinite cardinality. Think about what happens if we remove finitely many elements from an infinite set.
Apparently,  since
since  can be considered as finite.
can be considered as finite.  due to the definition of the set even though
due to the definition of the set even though  is not finite.
is not finite.
The union of arbitrary open as well as the intersection of a finitely many open sets are open again. The corresponding proof employs De Morgan’s Laws.
(f) Let be a non-empty countable set and  be the family of open sets. Then is the so-called countable complement topology.
be the family of open sets. Then is the so-called countable complement topology.
Apparently, since is countable and due to the definition. The corresponding proofs of the union and intersection of open sets also employs De Morgan’s Laws.
According to Proposition 1.1 – Fundamentals of Topology & Metric Spaces, the set  of all open sets in a metric space complies with the definition of a topology.
of all open sets in a metric space complies with the definition of a topology.
Definition 1.2 (Induced & Equivalent Topology)
A topology  induced by a metric space is defined as the set of all open sets in .
induced by a metric space is defined as the set of all open sets in .
Two metrics  and
and  on the same basic set are called topologically equivalent if
on the same basic set are called topologically equivalent if  .
.
Let us define a very basic but important term.
Definition 1.3 (Neighborhood)
A neighborhood of a point  in a topological space is any set containing as well as an open set
in a topological space is any set containing as well as an open set  of , i.e.
of , i.e.  .
.
Some examples will improve the understanding.
Example 1.2 (Metrizable and Equivalent Topologies)
(a) If is a metric space and  is the set of all open sets, then
is the set of all open sets, then  is a topology. The topology does not depend on the particular metric
is a topology. The topology does not depend on the particular metric  since the proof of the referred Proposition 1.1 can also be done using the term neighborhood instead of the distance function. Hence, any metric on equivalent to yields the same topology. Topological spaces of this kind are called metrizable.
since the proof of the referred Proposition 1.1 can also be done using the term neighborhood instead of the distance function. Hence, any metric on equivalent to yields the same topology. Topological spaces of this kind are called metrizable.
(b) Let us consider  equipped with the natural topology by taking the topology
equipped with the natural topology by taking the topology  induced by the Euclidean metric
induced by the Euclidean metric

with  and
and  . Instead of using the Euclidean metric, we could also employ the following distance functions:
. Instead of using the Euclidean metric, we could also employ the following distance functions:

All three induced topologies would be equivalent, i.e.  since
since

for all  . The corresponding unit open balls centered at
. The corresponding unit open balls centered at  are illustrated as follows.
are illustrated as follows.
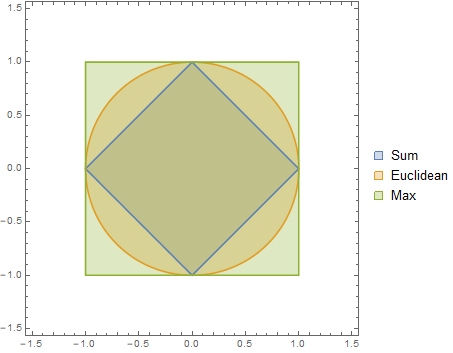
An open ball  with
with  as shown in Fig. 1 is actually a set of points where each point has a distance of max. 1 to the origin
as shown in Fig. 1 is actually a set of points where each point has a distance of max. 1 to the origin  . This, however, is nothing but the corresponding norm
. This, however, is nothing but the corresponding norm  . For instance, the point
. For instance, the point  is not an element of the unit ball induced by
is not an element of the unit ball induced by  since
since  . However, the same point
. However, the same point  is element of the unit balls induced by
is element of the unit balls induced by  and
and  .
.
From a topological point of view the shapes in Fig. 1 are all equivalent.
Closed Sets
Directly linked via the definition to open sets and equivalent in their explanatory power are closed sets.
A set is open in an Euclidean metric space if and only if for every  an open ball
an open ball  exists such that
exists such that  . Let us therefore consider the situation in the real plane
. Let us therefore consider the situation in the real plane  employing the topology induced by the Euclidean metric. The open balls
employing the topology induced by the Euclidean metric. The open balls  and
and  are both contained in .
are both contained in .
However, the open ball cannot be fully contained in no matter how small we pick  . Thus, is not an element of the open set .
. Thus, is not an element of the open set .

Let us now study sets  whenever is open.
whenever is open.
Definition 1.4 (Closed Sets)
A set is called closed in if  is open in .
is open in .
The definition actually tells us that one just needs to consider the complement set to figure whether the set is closed.
Example 1.3 (Closed Sets)
(a) Let b a metric space. Then is closed in  if and only if is closed in . For instance, an arbitrary open ball
if and only if is closed in . For instance, an arbitrary open ball  with
with  is open. Thus, the set
is open. Thus, the set  is closed. The situation for
is closed. The situation for  and the Euclidean topology is sketched in the next figure.
and the Euclidean topology is sketched in the next figure.

(b) The sets  are not only open but also closed for any topological space
are not only open but also closed for any topological space  since
since  and
and  .
.
The topological space is trivial / indiscrete if and only if these two sets are the only closed sets in . The closed sets of the indiscrete / trivial topology are the complements of the open sets. Hence, the closed sets are also  and .
and .
(c) The topology is discrete if and only if every subset  is closed. This can be seen by
is closed. This can be seen by  .
.
(d) The subset ![[a,b]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-a535f6287df84b084711c6e772614d2e_l3.png "Rendered by QuickLaTeX.com") of
of  is closed because its complement
is closed because its complement ![\mathbb{R} \setminus [a, b] = (-\infty, a) \cup (b, \infty)](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-3041b20d7af87c62695805741063c2a7_l3.png "Rendered by QuickLaTeX.com") is open. Similarly,
is open. Similarly,  is closed, because its complement
is closed, because its complement  is open.
is open.
The subsets  of are neither open nor closed.
of are neither open nor closed.
(e) In the finite complement topology on an infinite set , the closed sets consists of itself and all finite subsets of . This follows directly from the definition of the set as set out in Example 1.1 (e). According to this definition, the sets with need to be finite with the exception of  .
.
Let us characterize closed sets.
Proposition 1.1: (Characterization of Closed Sets)
(1) The set  of all closed sets of complies with the following conditions:
of all closed sets of complies with the following conditions:
(i)  and
and  .
.
(ii)  implies
implies  .
.
(iii)  implies
implies  .
.
(2) Let  be a family of sets that complies with (i), (ii) and (iii) then there exists a topology , such that is the set of all closed sets in .
be a family of sets that complies with (i), (ii) and (iii) then there exists a topology , such that is the set of all closed sets in .
Proof.
(1) This follows directly from the definitions and applying the rules  ,
,  ,
,  as well as
as well as  .
.
(2) The family of closed sets fully determines the topology on the same basic set since  . Its existence follows from the fact that actually is a topology but this is clear given (1).
. Its existence follows from the fact that actually is a topology but this is clear given (1).
The family of closed sets of a topology could also be used to define a topological space, i.e. the set of all closed sets contains exactly the same information as the set of all open sets that actually define the topology.
Points, that lie at the boundary between and , are crucial for the understanding and distinction of open and closed sets. The intuitive idea of a boundary point is depicted in the next figure.

Interior, Closure & Boundary
The points that lie close to both the “inside” and the “outside” of the set play an important role. However, before we can define a boundary point, we need to clarify what is meant by “inside” and “outside”.
Definition 1.5 (Interior & Closure)
Let be a topology. The interior of  is defined as the union of all open sets contained in , i.e.
is defined as the union of all open sets contained in , i.e.

The closure of is defined as the intersection of all closed sets containing , i.e.

Apparently, the interior of is open and a subset of while the closure of is closed and contains . Thus, the following set relation is valid for any set  in a topological space:
in a topological space:

The following theorem provides some useful relationships. However, we will not prove all of the statements and refer to section 2.1 in [5], for instance.
Theorem 1.1 (Properties of Closure and Interior)
For sets  in a topological space , the following statements hold:
in a topological space , the following statements hold:
(i) If  is an open set in and
is an open set in and  , then
, then  Int;
Int;
(ii) If  is a closed set in and
is a closed set in and  , then Cl;
, then Cl;
(iii) If  then Int
then Int Int
Int and Cl Cl;
and Cl Cl;
(iv) is open if and only if Int ;
;
(v) is closed if and only if Cl.
Proof. (i) Since Int is the union of all of the open sets that are contained in , it follows that is one of the sets making up this union and therefore is a subset of the union. That is, Int.
(ii) Since Cl is the intersection of all of the closed sets that contain , it follows that is one of the sets making up this intersection and therefore is Cl is contained in . That is, Cl .
.
(iii) Since  , Int is an open set contained in . According to (i) every open set contained in is contained in Int. Therefore, Int Int. One can use (ii) to show the second statement of (iii).
, Int is an open set contained in . According to (i) every open set contained in is contained in Int. Therefore, Int Int. One can use (ii) to show the second statement of (iii).
(v) If  Int, then is an open set since by definition Int is an open set. Now assume that is open. We show that Int. First, Int
Int, then is an open set since by definition Int is an open set. Now assume that is open. We show that Int. First, Int by definition of Int. Furthermore, since is an open set contained in , it follows by (i) that Int. Thus, Int as we wished to show.
by definition of Int. Furthermore, since is an open set contained in , it follows by (i) that Int. Thus, Int as we wished to show.
Example 1.4 (Closure and Interior)
(a) Consider  in the standard topology on . Then
in the standard topology on . Then ![\text{Cl}A \setminus \text{Int} A = [-1,1]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-6c018bc5e58c0eb542daec896a8d2e09_l3.png "Rendered by QuickLaTeX.com") and Int
and Int .
.
(b) Consider as a subset of  with the discrete topology
with the discrete topology  . Since all subsets are open and closed we have IntCl
. Since all subsets are open and closed we have IntCl .
.
(c) Consider in the finite complement topology on . Since a closd set in this topology is either  or finite, it is clear that only is a closed set containing the infinite set . Hence, Cl
or finite, it is clear that only is a closed set containing the infinite set . Hence, Cl . The open sets are precisely the empty set and the cofinite subsets, i.e., the subsets whose complements are finite subsets of . Hence, Int
. The open sets are precisely the empty set and the cofinite subsets, i.e., the subsets whose complements are finite subsets of . Hence, Int since there are no open sets in contained in .
since there are no open sets in contained in .
The last example highlights that not only the actual sets matter but also the sourounding topology. The next theorem provides a simple means for determining when a particular point is in the interior or in the closure of a given set .
Theorem 1.2 (Closure, Interior and Open Sets)
Let be a topological space, be a subset of , and  .
.
(i) Then  Int if and only if there exists an open set such that
Int if and only if there exists an open set such that  ;
;
(ii) Then Cl if and only if every open set containing intersects .
Proof. (i) First, suppose that there exists an open set such that . Then, since is open and contained in , it follows that Int. Thus,  Int.
Int.
Next, if Int, and we set  Int, it follows that is an open set such that
Int, it follows that is an open set such that  .
.
(ii) Considering the contrapositive:  Cl if and only if there is one neighborhood that does not intersect . If Cl then the set
Cl if and only if there is one neighborhood that does not intersect . If Cl then the set  Cl is open and does contain , which is as claimed in the contrapositive.
Cl is open and does contain , which is as claimed in the contrapositive.
Conversely, if there is a neighborhood of which does not intersects , then its complement  is a closed set that contains . By definition of the closure Cl, the set must contain Cl. Since
is a closed set that contains . By definition of the closure Cl, the set must contain Cl. Since  it follows that Cl. Contraction.
it follows that Cl. Contraction.
Theorem 1.3 (Relations of Closure and Interior)
For sets in a topological space , the following statements hold:
(i) Int =
=  Cl;
Cl;
(ii) Cl = Int;
(iii) Int Int
Int Int
Int , and in general equality does not hold;
, and in general equality does not hold;
(iv) Int Int = Int
Int = Int .
.
Proof. Refer to Theorem 2.6 in [5] and to Folgerung 1.2.25 in [3].
Now, we have all ingredients to define the so-called boundary.
Definition 1.6 (Boundary Set & Points)
Let , . The boundary of , denoted by  . A point of
. A point of  is called boundary point.
is called boundary point.
There are situations that challenge or defy our intuitive understanding of boundary sets. For example, what is the boundary of  as a subset of in the standard topology?
as a subset of in the standard topology?
Example 1.4 (Boundary Sets & Points)
(a) Consider ![A:=[-1,1]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-c3b73891c2297d5177c864c07363c98a_l3.png "Rendered by QuickLaTeX.com") in the standard topology on . The boundary set equals
in the standard topology on . The boundary set equals ![\text{Cl}A \setminus \text{Int} A = [-1,1] \setminus (-1,1)=\{-1,+1\}](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-f03dac4bedf9c8a9a376d8c9aad258f6_l3.png "Rendered by QuickLaTeX.com") .
.
(b) Consider in the standard topology on . Since  , and
, and  , it follows that
, it follows that  . The entire real line is therefore the boundary of the rational numbers, which makes sense. Every real number is arbitrarily close to the set of rational numbers and to its complement, the set of irrational numbers.
. The entire real line is therefore the boundary of the rational numbers, which makes sense. Every real number is arbitrarily close to the set of rational numbers and to its complement, the set of irrational numbers.
(c) Let ![A=[-1,1]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-8870a9b2a967a57a1ca72bcc9755ff55_l3.png "Rendered by QuickLaTeX.com") in with the discrete topology
in with the discrete topology  . That is, every subset is open and closed at the same time. Hence,
. That is, every subset is open and closed at the same time. Hence, ![\text{Int}[-1,1]=\text{Cl}[-1,1]=[-1,1]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-a1cf0e85541f8061c9e0aabe49f91419_l3.png "Rendered by QuickLaTeX.com") and
and ![\partial [-1,1]=\emptyset](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-80cdf38ef66d90c655992208941c19d2_l3.png "Rendered by QuickLaTeX.com") .
.
In a metric space, a point is a boundary point of if
(1) 
for all  .
.
Let us now prove the generalized statement about boundary sets.
Proposition 1.2 (Characterization of Boundary Points)
Let be a subset of a topological space and let . Then  if and only if every neighborhood of intersects both and .
if and only if every neighborhood of intersects both and .
Proof. Suppose , then  and
and  due to the definition. Since , it follows that every neighborhood of intersects . Note that a neighborhood of contains . Furthermore, since , it follows that every neighborhood of intersects . Thus, every neighborhood of intersects and .
due to the definition. Since , it follows that every neighborhood of intersects . Note that a neighborhood of contains . Furthermore, since , it follows that every neighborhood of intersects . Thus, every neighborhood of intersects and .
Now suppose that every neighborhood of intersects and  . It follows that and Cl. By
. It follows that and Cl. By
Theorem 1.4 (Open Sets and Neighborhoods)
Let be a topological space and let be a subset of . Then is open in if and only if for each , there is a neighborhood  of such that
of such that  .
.
Proof. First, suppose that is open in and . If we let  then is a neighborhood of for which .
then is a neighborhood of for which .
Now suppose that for every there exists a neighborhood  of such that
of such that  . Since we know that the union
. Since we know that the union  of open sets is open, the assertion follows.
of open sets is open, the assertion follows.
The set can be contained in or in :
- If all boundary points are outside of , i.e. if
 , then it is an open set.
, then it is an open set. - If all boundary points are contained within the set, then it is a closed set.
Proposition 1.2 (Closure and Open Sets)
Let be a topological space, be a subset of , and be an element of . Then if and only if every open set containing intersects .
Proof. The closure  is the smallest closed set containing as a subset. Let and let be an open neighborhood of . If
is the smallest closed set containing as a subset. Let and let be an open neighborhood of . If  then
then  , and the latter set is closed (by definition), which leads to a contradiction. So
, and the latter set is closed (by definition), which leads to a contradiction. So  .
.
The property of the closure hitting an open set is so important that usually a new term is defined. Note, however, that we will not further use it in this post.
Definition 1.7 (Adherent Point)
Let , and . The point is called adherent point if every open of has a non-empty intersection with , i.e.  for all
for all  with
with  .
.
Let us come back to Example 1.2 (a) – considering this example we could ask whether every topological space is metrizable?
The answer is no, and the root-cause is that topological spaces have different types of separation properties.
Separation Properties
A metric enables us to separate points in a metric space since any two distinct points have a strictly positive distance. In general topological spaces, separating points from each other is more subtle.
Hausdorff Space
Hausdorff spaces and the Hausdorff condition are named after Felix Hausdorff, one of the founders of topology. Let us first check out the formal definition.
Definition 2.1: (Hausdorff Space,  Spaces)
Spaces)
A topological space is a Hausdorff or -space if, for any pair of distinct points  ,
,  there are disjoint open sets
there are disjoint open sets  with ,
with ,  and
and  .
.
Every Euclidean space is Hausdorff since we can use the Euclidean metric to separate two distinct points. The following video outlines the Hausdorff condition and it provides a simple example of a Hausdorff space.
Example 2.1 (Metric Space is Hausdorff)
(a) Let be a metric space, and let be such that . It follows that  . Let
. Let  and
and  . Then, is Hausdorff since
. Then, is Hausdorff since  .
.
(b) Consider the indiscrete / trivial topology  with
with  . By definition, the only neighborhood of any two points is the entire set . Thus, every neighborhood of will contain
. By definition, the only neighborhood of any two points is the entire set . Thus, every neighborhood of will contain  and vice verca. It follows that the indiscrete / trivial topology is neither Hausdorff nor metrizable.
and vice verca. It follows that the indiscrete / trivial topology is neither Hausdorff nor metrizable.
In a Hausdorff space, distinct points can be separated by open sets.

The situation in  along with the topology implied by the Euclidean metric is illustrated in the graph above. For two distinct points
along with the topology implied by the Euclidean metric is illustrated in the graph above. For two distinct points  , we take half (or less) the distance to define
, we take half (or less) the distance to define  to come up with two distinct open balls, that can also be seen as disjoint neighborhoods.
to come up with two distinct open balls, that can also be seen as disjoint neighborhoods.
Proposition 2.1: (Subset of -spaces)
Let be a topological Hausdorff space. Then, each subset of a Hausdorff space is Hausdorff.
Proof. Let be in . The space being Hausdorff, let and  be the two open separating sets as required in Definition 1.1. Then
be the two open separating sets as required in Definition 1.1. Then  as well as
as well as  are open since the difference of two open sets is open. In addition, and .
are open since the difference of two open sets is open. In addition, and .
Spaces with Weaker Separation Property
The following separation properties are weaker than the Hausdorff (-) condition. This is also indicated by the index of the corresponding names of the separation axioms (from  to ).
to ).
Definition 2.2. ( Space)
A topological space is called a – or Kolmogorov space if, for any with , there is an open set  with and
with and  or
or  and
and  .
.
The most striking difference between a Hausdorff / – and -space is that only one open set , that contains only one of two distinct points, is required to fulfill the definition of a -space. Apparently, every -space is also a -space.
Example 2.2:
(a) Let  be any set with at least two elements equipped with the so-called chaotic topology
be any set with at least two elements equipped with the so-called chaotic topology  . Then, there is no open that separates the two distinct elements. Hence, this topology is not a -space and definitely also not a Hausdorff space. Hence, it is also not metrizable.
. Then, there is no open that separates the two distinct elements. Hence, this topology is not a -space and definitely also not a Hausdorff space. Hence, it is also not metrizable.
(b) Let be any set with the discrete topology  . Then,
. Then,  separates the two elements and .
separates the two elements and .
In a  -space two open sets are required to separate two distinct points, however, the two sets don’t need to be disjoint.
-space two open sets are required to separate two distinct points, however, the two sets don’t need to be disjoint.
Definition 2.3. ( Space)
A topological space is called a -space if, for any with , there are open sets  with and and and .
with and and and .
The main difference between a – and a -space is that the two required open sets do not have to be disjoint. However, one open set only contains one of the two distinct points.

Hence, every -space is also a -space. Just take one of the two open sets of the -space and it fulfills all requirements of a -space.
Proposition 2.2: (Characterization of -spaces)
(a) Let be a topological space. Then, is a -space if and only if  is a closed set for each ;
is a closed set for each ;
(b) Each Hausdorff space is a -space.
Proof. (a) Suppose is a -space, and let . For any  with
with  , there is an open subset
, there is an open subset  of with
of with  , but
, but  . It follows that
. It follows that  .
.
Conversely, suppose that all singleton subsets of are closed, and let be such that . Then,  and
and  fulfill the requirements of a -space.
fulfill the requirements of a -space.
(b) Let be a given point. By assumption, each belongs to an open set such that  . Consequently,
. Consequently,  . Thus,
. Thus,  is open, and is closed.
is open, and is closed.
Convergent Sequences
One of the key features of topological spaces is the generalization of the convergence concept.
A sequence in a (metric) space is a function  that we also denote by
that we also denote by  , in particular, if we want to refer to the elements of the sequence. Given a sequence
, in particular, if we want to refer to the elements of the sequence. Given a sequence  in a metric space, a sub-sequence is the restriction of to an infinite subset
in a metric space, a sub-sequence is the restriction of to an infinite subset  . If we exhibit
. If we exhibit  as
as  , then we write the subsequence
, then we write the subsequence  .
.
We say that a sequence converges to if given , there exist  such that for all
such that for all  , we have
, we have  .
.

In other words, for all  , we have as illustrated in Figure above. The finitely many elements
, we have as illustrated in Figure above. The finitely many elements  of the sequence are, however, not contained in
of the sequence are, however, not contained in  . We take this property to define what a convergent sequence in a topological space is.
. We take this property to define what a convergent sequence in a topological space is.
Definition 3.1. (Convergent Sequence)
Let be a topological space. A sequence converges to if , the set  is finite for any open set
is finite for any open set  .
.
The point is then called the limit of the sequence and we denote it by  or by
or by  .
.
Note that the set of  is infinite for all open sets while (at the same time) the set is finite. Both sets/conditions matter in this situation as we will see further below!
is infinite for all open sets while (at the same time) the set is finite. Both sets/conditions matter in this situation as we will see further below!
Lemma 3.1. (Limit of a sequence is unique)
The limit of a convergent sequence  in a Hausdorff space is unique.
in a Hausdorff space is unique.
Proof. Assume that this is not the case and as well as  with holds true. A metric space is Hausdorff, that is, we find two disjoint open balls
with holds true. A metric space is Hausdorff, that is, we find two disjoint open balls  and
and  . Given that and are the limit points almost all elements must lie in the disjoint balls, which contradicts the initial assumption of .
. Given that and are the limit points almost all elements must lie in the disjoint balls, which contradicts the initial assumption of .
Lemma 1.1 is false in arbitrary topological spaces.
Every of a topological space is the limit of a certain sequence . Apparently, we could simply use the constant sequence  or we could define
or we could define  for all
for all  , . This fact should be also considered in the following examples.
, . This fact should be also considered in the following examples.
Example 3.1:
(a) Let be the discrete topology with  . Further, let . Recall that in this topology every set is open by definition. Hence, also is an open set that must be contained in all other (open) supersets. Hence, the set
. Further, let . Recall that in this topology every set is open by definition. Hence, also is an open set that must be contained in all other (open) supersets. Hence, the set  has to be finite and
has to be finite and  has to be infinite.
has to be infinite.
(b) Let be the indiscrete topology with  . Further, let . Since
. Further, let . Since  is the only set that contains , the set
is the only set that contains , the set  has to be finite for every sequence . Hence, every sequence converges to every point in .
has to be finite for every sequence . Hence, every sequence converges to every point in .
Closely related to converging sequences and their limits are accumulation points.
Definition 3.2. (Accumulation Point)
An element of a sequence is called accumulation point (sometimes also cluster or limit point) if  is infinite for every open set of .
is infinite for every open set of .
The subtle but important difference between an accumulation point and a limit is that the complement set of can also be infinite. Let us consider a simple example.
Example 3.2:
Let us consider the sequence  in the topology induced by the Euclidean space
in the topology induced by the Euclidean space  on the real line. There are two accumulation points
on the real line. There are two accumulation points  but no limit of the sequence. Note that the sequence is alternating between
but no limit of the sequence. Note that the sequence is alternating between  and
and  , such that
, such that  and
and  are both infinite but disjoint to each other. In addition, the set for an open set of
are both infinite but disjoint to each other. In addition, the set for an open set of  are both infinite.
are both infinite.
A sub-sequence of a convergent sequence converges to the same limit . This is evident since if the condition of a convergent sequence is fulfilled for all elements , of the series . Hence, the condition is also fulfilled for a subset  that represents the sub-sequence.
that represents the sub-sequence.
Due to the fact that the finiteness of implies the infiniteness of in  every limit is an accumulation point. The converse is not true as we can see in Example 3.2.
every limit is an accumulation point. The converse is not true as we can see in Example 3.2.
Theorem 3.1 (Convergence in Topological Spaces)
Let be a topological space.
(i) Every limit of a convergent sequence is also the limit of any sub-sequence.
(ii) Every accumulation point of any sub-sequence is also an accumulation point of .
(iii) Every accumulation point of a sequence in is an adherence point of the set .
Proof. (i) If then  is finite for all open of . In particular, this holds true for any sub-sequence
is finite for all open of . In particular, this holds true for any sub-sequence  and thus
and thus  .
.
(ii) Let  be an accumulation point of the sub-sequence, i.e. the set
be an accumulation point of the sub-sequence, i.e. the set  is infinite for every open set of . Since the sub-sequence is only a subset of the element of the sequence, the assertion follows directly.
is infinite for every open set of . Since the sub-sequence is only a subset of the element of the sequence, the assertion follows directly.
(iii) Let be an accumulation point of and be an open set of . Apparently, intersects since the set  is infinite. Thus, will also intersect , which implies that Cl.
is infinite. Thus, will also intersect , which implies that Cl.
Let us now assume that  and
and  is a converging sequence with
is a converging sequence with  for all . Then, the limit point is also contained in . A closed set contains all its limit points.
for all . Then, the limit point is also contained in . A closed set contains all its limit points.
Compactness
The concept of compactness is not as intuitive as others topics such as continuity. In  , the compact sets are the closed and bounded sets, but in a general topology compact sets are not as simple to describe.
, the compact sets are the closed and bounded sets, but in a general topology compact sets are not as simple to describe.
Compact sets are so important since they possess important properties, that are known from finite sets:
- Set is bounded;
- Set contains a maximal and minimal element;
- An infinite sequence contains a constant subsequence.
The famous Heine-Borel Theorem shows that compact sets in metric spaces do indeed have these properties. This analogy is also outlined in this really nice video (in German only) by Prof. Dr. Edmund Weitz.
Let be a topological space.
Definition 4.1 (Cover)
The collection is said to cover a set or to be a cover of if the union of the elements of contains .
If covers , and each set in is open, then we call an open cover of .
A sub-collection  of a cover is called a subcover of .
of a cover is called a subcover of .
A cover of is a collection of possibly overlapping sets in which, after considering their union globally, contains the set inside.
Example 4.1 (Real Line)
Let us consider the set  of the topological space
of the topological space  , where are the open sets of . Note that any nonempty open subset of can be written as a finite or countable union of open mutually disjoint intervals.
, where are the open sets of . Note that any nonempty open subset of can be written as a finite or countable union of open mutually disjoint intervals.
Then,  is an open cover of because
is an open cover of because  . This cover apparently contains infinitely many open sets
. This cover apparently contains infinitely many open sets  .
.
 is an open subcover of since
is an open subcover of since  and
and  . This subcover, however, still contains infinitely many open sets.
. This subcover, however, still contains infinitely many open sets.
Now, we have the ingredients for the central definition of this section.
Definition 4.2 (Compact Set)
A subset  of a topological space is said to be compact if every open cover of has a finite (open) subcover.
of a topological space is said to be compact if every open cover of has a finite (open) subcover.
A topological space is called compact if is compact.
It is clear that every finite set is compact and the following example is going to illustrate that.
Example 4.2 (Finite Set & Compactness)
Let  be a finite set in the standard Euclidean topological space
be a finite set in the standard Euclidean topological space  . By setting
. By setting

with , an open set  is assigned bijectively to each point
is assigned bijectively to each point  . Hence, the set
. Hence, the set  is an open and finite cover for any set
is an open and finite cover for any set  . Each point of the finite set is contained in one of the elements of . Given any open cover , we can always use with small enough simply because there are only finitely many elements in .
. Each point of the finite set is contained in one of the elements of . Given any open cover , we can always use with small enough simply because there are only finitely many elements in .
Let us consider another simple example.
Example 4.3 (Real Line)
The real line in the standard Euclidean topology is not compact since the set of Example 5.1 is an open cover, but no finite sub-collection of covers . If we picked finitely many open sets of the points before the minimum / after the maximum of this sub-collection would not be covered.
The last example directly used the definition of a compact set to show that it is not compact since every open cover needs to have a finite sub-cover such that the set can be compact.
Even though  is a finite open cover of
is a finite open cover of  , this does not mean that is compact: if it were compact, all open covers (including the one defined in Example 5.2/5.3) would have to have a finite sub-cover.
, this does not mean that is compact: if it were compact, all open covers (including the one defined in Example 5.2/5.3) would have to have a finite sub-cover.
Example 4.4 (Converging Sequence & Compact Set)
(a) The subset 
 is compact in the standard topology on .
is compact in the standard topology on .
Given any open cover of , there is an element set  containing
containing  . The set
. The set  contains either all points or all but finitely many of . If contains all of the points in , then , by itself, is a finite subcover of . Otherwise, let
contains either all points or all but finitely many of . If contains all of the points in , then , by itself, is a finite subcover of . Otherwise, let  be the smallest of the points in that are not in . Then we can pick open sets
be the smallest of the points in that are not in . Then we can pick open sets  for
for  ,
,  for
for  ,
,  , and
, and  for
for  such that
such that  is a finite sub-cover of . Hence, is compact.
is a finite sub-cover of . Hence, is compact.
(b) The compact sets of the discrete topology are finite. To see this realize that all subsets of are open and closed. Thus, all possible families of subsets can be open covers. For instance, the family  is an open cover and if is of infinite cardinality, so is . If we leave out one of the elements of it would not be a cover. Hence, there can be no open subcover, which implies that the compact sets are finite. Refer also to this formal proof.
is an open cover and if is of infinite cardinality, so is . If we leave out one of the elements of it would not be a cover. Hence, there can be no open subcover, which implies that the compact sets are finite. Refer also to this formal proof.
Let us now extend the definition of compactness to subsets of topological spaces.
Definition 4.1 (Subspace Topology)
Let be a topological space. If  , the collection
, the collection

is a topology on , called the subspace topology. With this topology,  is called topological subspace of .
is called topological subspace of .
Let us check that is indeed a topology. It contains and because  and
and  , where and on the right-hand side of the
, where and on the right-hand side of the  -symbol are elements of . The fact that it is closed under finite intersections and arbitrary unions follows from the equations
-symbol are elements of . The fact that it is closed under finite intersections and arbitrary unions follows from the equations

Lemma 4.1 (Compactness & Subspaces)
Let be a subspace of . Then is compact in if and only if every open cover of by open sets in contains a finite subcover of .
Proof. Suppose that is compact and  is a cover of by sets open in . Then the collection
is a cover of by sets open in . Then the collection  is a covering of by sets open in . Due to the assumption that is compact in , there exists a finite subcover
is a covering of by sets open in . Due to the assumption that is compact in , there exists a finite subcover

in . For each chose a set  . Then
. Then

covers .
Suppose that every open cover of by sets open in contains a finite open subcover of . We would like to show that is compact in . Let  be an open cover of by sets open in (and thus in ). By hypothesis, some finite subcollection
be an open cover of by sets open in (and thus in ). By hypothesis, some finite subcollection  exists that covers . Then, by definition of the subspace topology, for each
exists that covers . Then, by definition of the subspace topology, for each  , we can chose an open set
, we can chose an open set  via
via  . It follows that
. It follows that  is a finite subcover of in . Hence, is compact in .
is a finite subcover of in . Hence, is compact in .
A closed subspace is a subspace , that when treated as a subset of the original space is a closed set in the original topology .
Theorem 4.1 (Compactness & Closed Spaces)
Every closed subspace of a compact space is compact.
Proof. Let be a closed subspace of the compact space . Given a covering of by sets open in , let us form an open cover  by adjoining to the single open set
by adjoining to the single open set  . Note that is closed such that its complement needs to be open.
. Note that is closed such that its complement needs to be open.
Thus,  is an open cover of . Due to the fact that is compact, some finite subcollection of covers . If this subcollection contains the set
is an open cover of . Due to the fact that is compact, some finite subcollection of covers . If this subcollection contains the set  , discard . Otherwise, leave the subcollection alone. The resulting collection is a finite cover of that covers . Hence, is compact.
, discard . Otherwise, leave the subcollection alone. The resulting collection is a finite cover of that covers . Hence, is compact.
Theorem 4.2 (Compactness in Hausdorff Spaces)
Every compact subspace of a Hausdorff space is closed.
Proof. Let be a compact subspace of a Hausdorff space . We are going to prove that is open, so that is closed.
Let  . We show there is a neighborhood of that is disjoint from . For each point
. We show there is a neighborhood of that is disjoint from . For each point  , let us choose disjoint neighborhoods and of the points and , respectively (using the Hausdorff condition). The collection
, let us choose disjoint neighborhoods and of the points and , respectively (using the Hausdorff condition). The collection  is a covering of by sets open in . Therefore, finitely many of them
is a covering of by sets open in . Therefore, finitely many of them  cover (since is assumed to be compact). The open set
cover (since is assumed to be compact). The open set  contains . The open set
contains . The open set  contains all points that are disjoint from any of the open sets
contains all points that are disjoint from any of the open sets  and thus . Hence, is a neighborhood of some arbitrary
and thus . Hence, is a neighborhood of some arbitrary  and thus is closed.
and thus is closed.
Example 4.5 (Theorems 4.1 and 4.2)
(a) Once we prove that the interval in  is compact, it follows from Theorem 4.1 that any closed subspace of is compact. On the other hand, it follows from Theorem 4.2 that the intervals
is compact, it follows from Theorem 4.1 that any closed subspace of is compact. On the other hand, it follows from Theorem 4.2 that the intervals ![(a, b]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-3fa78931304f8099af66c27c8ffc865f_l3.png "Rendered by QuickLaTeX.com") and
and  in cannot be compact because they are not closed in the Hausdorff space .
in cannot be compact because they are not closed in the Hausdorff space .
(b) The Hausdorff condition in Theorem 4.2 is necessary. Consider the finite complement topology on the real line. The only proper subsets of that are closed in this topology are the finite sets. But every subset of is compact in this topology since you can always find an open finite subcover given any open cover.
(c) The interval ![(0,1]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-99d7656b25c0d2489bc0301750c7c34b_l3.png "Rendered by QuickLaTeX.com") is not compact in the Euclidean standard topology of . The open cover
is not compact in the Euclidean standard topology of . The open cover  contains no finite sub-collection covering .
contains no finite sub-collection covering .
Continuous Functions
Topological spaces have been introduced because they are the natural habitat for continuous functions. These spaces have been built such that the topological structure is respected. Continuous functions therefore take the same role on topological spaces as linear maps within vector spaces.
The notion of continuity is particularly easy to formulate in terms of open (and closed) sets and the following version is called the open set definition of continuity.
Definition 5.1: (Continuous Function on Topological Space)
Let and  be two topological spaces. A function
be two topological spaces. A function  is continuous if
is continuous if  is open in for every open set
is open in for every open set  in .
in .
Before we will illustrate this definition let us recall the definitions of an image  and a preimage
and a preimage  of a function with ,
of a function with ,  :
:

The condition that  be continuous says that for each open set of , the inverse image of under the map
be continuous says that for each open set of , the inverse image of under the map  is open in
is open in
Example 5.1: (Simple Continuous Function)
Let  and
and  be two topological spaces defined by
be two topological spaces defined by

Let  be three functions defined by
be three functions defined by

The functions  is continuous since the pre-image of each open set in is an element of . Similarly,
is continuous since the pre-image of each open set in is an element of . Similarly,  is continuous but note that
is continuous but note that  is not an open set. The function
is not an open set. The function  , however, is not continuous since
, however, is not continuous since  is open in , but
is open in , but  is not open in .
is not open in .
Let us now study how the functions map closed sets. By definitions these are the complements of and , i.e.

Recognize that the image of a closed set in under and is contained in a closed set in . For instance, 

 and
and  and
and  .
.
The last example made the definition of a continuous function between simple topological spaces rather clear.
Sometimes it is also helpful to study the properties that will not be preserved: a continuous function does not necessarily map open sets to open sets.
For example, the function  , given by
, given by  , is continuous, but the image of the open set
, is continuous, but the image of the open set  is
is  , which is neither open nor closed. Let us also double-check that in Example 4.1. The function maps the open set
, which is neither open nor closed. Let us also double-check that in Example 4.1. The function maps the open set  to
to  , which is not open.
, which is not open.
Now, let us have a look at more general examples.
Example 5.2: (Identity and Constant Function)
(a) The identity function id: , given by id
, given by id , is continuous in all topological spaces. If a function
, is continuous in all topological spaces. If a function  is continuous at , i.e. if is open so is its preimage . This argument can be generalized onto subsets .
is continuous at , i.e. if is open so is its preimage . This argument can be generalized onto subsets .
(b) The constant function  defined by
defined by  for every . Suppose is open in , then
for every . Suppose is open in , then  if
if  , and
, and  if
if  . In either case, the preimage is open in , and therefore
. In either case, the preimage is open in , and therefore  is continuous.
is continuous.
Continuous functions preserve proximity as we can see in the next theorem. Also refer to Example 4.1.
Theorem 5.1 (Continuous Functions & Closeness)
Let  be continuous and assume that . If , then
be continuous and assume that . If , then  .
.
Proof. Suppose that is continuous, , and . We prove that if  , then
, then  .
.
Hence, suppose that  . By Proposition 1.2 there exists an open set containing
. By Proposition 1.2 there exists an open set containing  , but not intersecting . It follows that
, but not intersecting . It follows that  is an open set containing that does not intersect . Thus,
is an open set containing that does not intersect . Thus,  , and the result follows.
, and the result follows.
The next theorem translates the well-known – definition of continuity with Definition 4.1.
definition of continuity with Definition 4.1.
Theorem 5.2 (Continuity & – Condition)
A function is continuous in the open set definition of continuity if and only if, for every and every open set containing , there exists a neighborhood of such that  .
.
Proof. First, suppose that the open set definition holds for functions . Let and an open set  containing be given. Set
containing be given. Set  . It follows that and that is open in since is continuous by the open set definition 4.1. Clearly,
. It follows that and that is open in since is continuous by the open set definition 4.1. Clearly,  , and therefore we have shown the desired result.
, and therefore we have shown the desired result.
Now assume that for every and every open set containing , there exist a neighborhood of such that  . We show that
. We show that  is open in for every open set
is open in for every open set  in . Hence, let be an arbitrary open set in . To show that is open in , choose an arbitrary
in . Hence, let be an arbitrary open set in . To show that is open in , choose an arbitrary  . It follows that
. It follows that  , and therefore exists a neighborhood of in such that
, and therefore exists a neighborhood of in such that  , or, equivalently, such that
, or, equivalently, such that  . Thus, for an arbitrary there exists an open set such that
. Thus, for an arbitrary there exists an open set such that  . Then, the assertion follows applying Theorem 1.1.
. Then, the assertion follows applying Theorem 1.1.
Theorem 4.2 generalizes this idea of continuity in metrizable topological spaces to general topological spaces. In a metric space, we can consider an open ball as an open set and therefore as a neighborhood. That is, for each -ball  there need to be a suitable -ball
there need to be a suitable -ball  , such that
, such that  . For further details please refer to this deep-mind.org post and this Wikipedia article.
. For further details please refer to this deep-mind.org post and this Wikipedia article.

The second important property that is preserved by continuous functions is the concept of convergence.
Theorem 5.3 (Continuity & Convergent Sequences)
Assume that  is continuous. If a sequence
is continuous. If a sequence  in converges to a point , then the sequence
in converges to a point , then the sequence  in converges to .
in converges to .
Proof. Let be an arbitrary neighborhood of in . Since is continuous, is open in . Furthermore,  implies that
implies that  . The sequence converges to ; thus, there exists such that
. The sequence converges to ; thus, there exists such that  for all . It follows that
for all . It follows that  for all , and therefore the sequence converges to .
for all , and therefore the sequence converges to .
Another important property of continuous functions is directly linked to the actual definition.
Theorem 5.4 (Continuity & Pre-Image of Closed Sets)
Let and be topological spaces. A function is continuous if and only if is closed in for every closed set .
Proof. Let be closed in and let  . We wish to prove that is closed in . We show that Cl. By elementary set theory, we have
. We wish to prove that is closed in . We show that Cl. By elementary set theory, we have  . Therefore, if then
. Therefore, if then 
 . Hence,
. Hence,  and Cl and thus Cl.
and Cl and thus Cl.
Theorem 5.5 (Continuous Functions & Compact Sets)
Let be continuous, and let be compact in . Then is compact in .
Proof. Let be continuous, and assume that is compact in . To show that is compact in , let  be a cover of by open sets in . Then is open in for every set
be a cover of by open sets in . Then is open in for every set  . Hence,
. Hence,  is a cover of by open sets in . Since is compact there is a finite sub-collection of that covers . Thus, has a finite sub-cover, implying that is compact in .
is a cover of by open sets in . Since is compact there is a finite sub-collection of that covers . Thus, has a finite sub-cover, implying that is compact in .
Appendix
A really nice introduction to the abstract concept of a topology, however, in German language only.
Literature
[1]
[2]
[3]
[4]
[5]