
In this brief post, we investigate the topological foundations of analysis. We limit the scope to the topology of a metric space. In particular, we provide the knowledge that is needed for the application to probability and measure theory.
A good introduction for all German-speakers is also provided by Prof. Dr. Edmund Weitz as embedded in the Appendix.
The objective of the next section is to prepare the very basic concept for the definition of a topological space. We start by defining an open and a closed ball, a neighborhood, interior point, an open and a closed set. All these definitions are interlinked to each other as we will see later on.
Parts of this post are based on [1] and [2].
Basic Definitions & Properties
Balls, Open & Closed Sets & Neighborhoods
Let  denote a metric space.
denote a metric space.
Definition 1.1
An (open) ball  of radius
of radius  and center
and center  is the set of all points of distance less than from , i.e.
is the set of all points of distance less than from , i.e.  .
.

A closed ball  of radius is the set of all points of distance less than or equal to from , i.e.
of radius is the set of all points of distance less than or equal to from , i.e.  .
.

A subset  of
of  is called a neighborhood of
is called a neighborhood of  if there is some
if there is some  such that
such that  .
.

An element  is called an interior point of
is called an interior point of  if there is a neighborhood of such that
if there is a neighborhood of such that  .
.
A set of is called open if every point of is an interior point.

The introduced concepts “interior point” and “open set” (and hence also the concept of “closed sets”) depend on the surrounding metric space  . It is sometimes useful to make this explicit by saying “ is an interior point of with respect to ” or “ is open in “.
. It is sometimes useful to make this explicit by saying “ is an interior point of with respect to ” or “ is open in “.
By definition, every superset of a ball is considered to be a neighborhood. Neighborhoods can be defined without mentioning explicitly the corresponding metric space.
Example 1.1
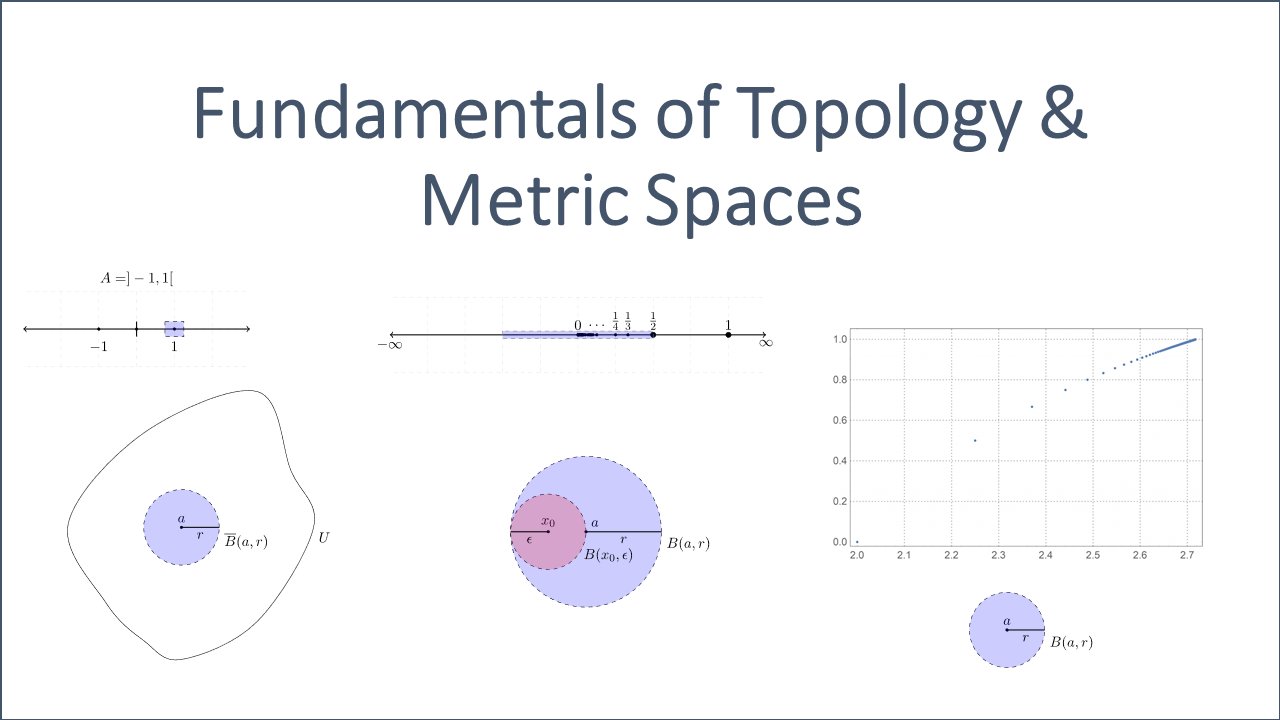
An open ball in  is an open interval
is an open interval  . However, if we consider embedded in
. However, if we consider embedded in  , then is apparently not an open ball in .
, then is apparently not an open ball in .

For the sake of illustration we sketch a 2-dimensional open ball (i.e. an open interval) as a rectangle even though it would actually be a line without end-points. These end-points are illustrated by the lines crossing the x-axis.
The heuristic reasoning for that is that a one-dimensional interval cannot contain an open two-dimensional ball not matter how small the radius of this ball might be.
Apparently, is an interior point of if and only if there is some real  such that
such that  . In addition, is open if and only if is a neighborhood of each of its points.
. In addition, is open if and only if is a neighborhood of each of its points.
Example 1.2
Let us consider open and closed balls in  along with the standard Euclidean metric
along with the standard Euclidean metric  . Every open ball
. Every open ball  , in is an open set. Let
, in is an open set. Let  be an arbitrary point. Set
be an arbitrary point. Set  and consider
and consider  with
with  .
.

For all  we have
we have

and so is contained in . This shows that the arbitrary point  is an interior point of
is an interior point of  and thus an open ball is an open set.
and thus an open ball is an open set.
That is, a set is open if and only if for every  an open ball
an open ball  exists such that .
exists such that .
Definition 1.2 (Boundary Point)
Let  and
and  . Then,
. Then,  is called boundary point for if
is called boundary point for if
(1) 
for all  . The set of all boundary points is denoted by
. The set of all boundary points is denoted by  .
.
Boundary points are just points on the boundary between the set and the surrounding basis set (i.e.  of the metric space .
of the metric space .

can be contained in or in  . If all boundary points are outside of , i.e. if
. If all boundary points are outside of , i.e. if  , then it is an open set.
, then it is an open set.
Definition 1.3 (Closed Set)
A set of is called closed in if its complement is open in .
Equivalently, if all boundary points of are inside the set , i.e. if  , then it is a closed set. This also means that the set
, then it is a closed set. This also means that the set  is always a closed set no matter what is. The set
is always a closed set no matter what is. The set  is then also called the closure of .
is then also called the closure of .
Example 1.3
(a) The interval  is closed in
is closed in  .
.
Let  denote a real number that is not an element of . Then,
denote a real number that is not an element of . Then,  and the ball
and the ball  with
with  has empty intersection with .
has empty intersection with .
Hence, the complement is open and so the set is closed.

For the sake of illustration we sketch a 2-dimensional open ball as a rectangle even though it would actually be a line without end-points.
Note that all closed intervals in  are of the form
are of the form ![[a,b]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-a535f6287df84b084711c6e772614d2e_l3.png "Rendered by QuickLaTeX.com") ,
,  ,
, ![(-\infty, b]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-3c288178b97d3e8701145b24be3ea950_l3.png "Rendered by QuickLaTeX.com") ,
,  and .
and .
Let us now consider the set  . For all
. For all  and
and  we have
we have  . Hence, the set
. Hence, the set  is open in .
is open in .
Note that all open intervals in are of the form  ,
,  ,
,  , and .
, and .
(b) Now consider the metric space with ![X:= (0,1] \cup (5,\infty)](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-738b55fe7b41d751cd4999f1eb521d6c_l3.png "Rendered by QuickLaTeX.com") with the same distance function
with the same distance function  ,
,  as in (a).
as in (a).
The set ![A:=(0,1]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-314130da3555223c90ac204b8b3e4b92_l3.png "Rendered by QuickLaTeX.com") is an open set since for all
is an open set since for all  we consider the open ball
we consider the open ball  with
with  . That is, we determine the shortest distance between and the two points
. That is, we determine the shortest distance between and the two points  and
and  and divide it by 2. Then, the corresponding open ball is contained within the set . For the point
and divide it by 2. Then, the corresponding open ball is contained within the set . For the point  , we can consider the open ball with
, we can consider the open ball with  , for instance. This open ball equals
, for instance. This open ball equals ![B(x=1, \epsilon=1)=(0,1]](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-f76bc88e506b2c5ecadf56900c039fd2_l3.png "Rendered by QuickLaTeX.com") since all the figures right from until 5 are not contained in . Hence, is open.
since all the figures right from until 5 are not contained in . Hence, is open.
The set is also closed since  is included in . Note that is not a boundary point since it is not an element of the metric space . The point is not a boundary point since for
is included in . Note that is not a boundary point since it is not an element of the metric space . The point is not a boundary point since for  , for instance,
, for instance, ![B(x=1, \epsilon=0.5) \cap A^C= (0.5, 1] \cap (5, \infty) = \emptyset](https://www.deep-mind.org/wp-content/ql-cache/quicklatex.com-811d5d1f848109a898eabddb09bb59c8_l3.png "Rendered by QuickLaTeX.com") holds true.
holds true.
(c) Let us consider the metric space  of all integers together with the discrete metric
of all integers together with the discrete metric  for all . It follows that the open ball
for all . It follows that the open ball 
 of radius
of radius  and center at is either
and center at is either  if
if  or if
or if  .
.
(d) Let us consider open and closed balls in along with the standard Euclidean metric . Every closed ball  ,
,  in is a closed set. That is, we need to show that the complement set
in is a closed set. That is, we need to show that the complement set  is open. Let
is open. Let  . Set
. Set  and consider the open ball
and consider the open ball  , that does not intersect with the closed ball due to the choice of
, that does not intersect with the closed ball due to the choice of  : Let
: Let  , then the following holds due to the triangular property.
, then the following holds due to the triangular property.

and  because of
because of  .
.
Note that this also means that every isolated point in  along with the Euclidean metric is a closed set.
along with the Euclidean metric is a closed set.
In the following section we are going to outline basic properties of open & closed sets, which will provide the heuristic for the definition of a topological space.
Properties of Open & Closed Sets
The following two propositions state basic properties of open and closed sets. It turns out that these properties characterize a topological space.
Proposition 1.1 (Open Sets)
Let  be a family of open sets.
be a family of open sets.
(i)  ;
;
(ii)  if
if  for an arbitrary index set
for an arbitrary index set  ;
;
(iii)  if for a finite index set .
if for a finite index set .
Proof:
(i) The empty set possesses every property since it does not have an element. Hence, the empty set is closed and open. Correspondingly, the set is open.
(ii) If  then there must be an index
then there must be an index  such that
such that  with
with  . All the more
. All the more  holds true.
holds true.
(iii) Let  with
with  be open sets. Since
be open sets. Since  there exists a
there exists a  for each
for each  with . If we set
with . If we set  then
then  and the assertion follows.
and the assertion follows.
Why (iii) holds only true for finite index sets can also be seen if we try to prove that the intersection of two open balls at  is open again. Just chose
is open again. Just chose  for the open ball of the intersection
for the open ball of the intersection  . This can be iterated provided that the index set is finite.
. This can be iterated provided that the index set is finite.
Please note that the proof above would also be valid if we use neighborhoods instead of balls. This would mean that the proof is not dependent on the used metric space and suggests that we could derive a new mathematical structure from it, where –in general– no algebraic operations, distance functions or orders need to be defined. However, given that we restrict our-self to topology for metric spaces, we will not further outline this idea.
The proof of the corresponding proposition for closed sets is apparent given the definition of a closed set.
Proposition 1.2 (Closed Sets)
Let  be a family of closed sets.
be a family of closed sets.
(i) ;
(ii) if for an arbitrary index set ;
(iii) if for a finite index set .
Proof:
Apply the definition and Proposition 1.1 (Open Sets).
Example 1.4
Let us continue Example 1.3. The intersection of a finite number of intervals  is closed in
is closed in  . Without loss of generality, let
. Without loss of generality, let  . All the sets are closed and so is
. All the sets are closed and so is  in .
in .
Let us now consider the family of open sets  . For all elements
. For all elements  of all open sets
of all open sets  , we can find an open ball
, we can find an open ball  . Hence, the union of these sets also contain open balls for all elements and is thus an open set itself.
. Hence, the union of these sets also contain open balls for all elements and is thus an open set itself.
Example 1.5
An infinite intersection of open sets need not to be open. Consider  in
in  . Apparently, there cannot be an such that
. Apparently, there cannot be an such that  .
.
Correspondingly, infinite unions of closed sets need not to be closed. To this end, consider  in .
in .
Accumulation and Limit Points
Closely related to closed sets are so-called accumulation and limit points. In addition, this section will pave the way to one of the below application of a topological space — limits.
Definition 1.2 (Accumulation & Limit Point)
Let  and . We call an accumulation point of if every neighborhood of in has non-empty intersection with .
and . We call an accumulation point of if every neighborhood of in has non-empty intersection with .
The element is called limit point of if every neighborhood of in contains a point of other than . Finally we set

Every point within an open set but also every limit point of this set is an accumulation point as illustrated in the following example. Here,  is the open interval in the standard metric space
is the open interval in the standard metric space  .
.
Every point in  is an interior, an accumulation and a limit point of . Note that an interior point of requires to have a neighborhood that is contained in . Given that is an open set this holds true for all points within the set by definition.
is an interior, an accumulation and a limit point of . Note that an interior point of requires to have a neighborhood that is contained in . Given that is an open set this holds true for all points within the set by definition.

The ‘boundary’ points  and are no interior points but limit and accumulation points of . Why?
and are no interior points but limit and accumulation points of . Why?
Because we can define any open ball around it and the intersection with will always contain a point different from  .
.
Let us now consider a set  with a single isolated point in the metric space
with a single isolated point in the metric space  . Is , that is the only element of the set, an accumulation and/or a limit point of ?
. Is , that is the only element of the set, an accumulation and/or a limit point of ?
Apparently, every neighborhood of in has non-empty intersection with , i.e.  . However, is not a limit point since the intersection
. However, is not a limit point since the intersection  does not contain a point other than .
does not contain a point other than .
According to our thoughts above, elements of are accumulation points of . This fact is also reflected in the next proposition.
Proposition 1.3: Let be a subset of a metric space  .
.
(i)  ;
;
(ii)  if and only if is closed.
if and only if is closed.
Proof: (i) See argumentation above.
(ii) ‘ Let
Let  . Since is not an accumulation point of , there is some
. Since is not an accumulation point of , there is some  of all neighborhoods of such that
of all neighborhoods of such that  . Thus,
. Thus,  , that is, is an interior point of
, that is, is an interior point of  . Consequently is open and is closed in .
. Consequently is open and is closed in .
‘ Let be closed in . Then is open in according to its definition. For any
Let be closed in . Then is open in according to its definition. For any  , there is some
, there is some  such that
such that  . This means that and are disjoint, and so is not an accumulation point of , i.e.,
. This means that and are disjoint, and so is not an accumulation point of , i.e.,  . Hence, we have proved the inclusion
. Hence, we have proved the inclusion  , which is equivalent to
, which is equivalent to  . With (i), this implies
. With (i), this implies  .
.
The limit points of a set are the limits of certain sequences in .
Proposition 1.4: An element of is a limit point of if and only if there is a sequence  in
in  which converges to .
which converges to .
Proof: Let be a limit point of . For each  , choose some element
, choose some element  in
in  . Then is a sequence in
. Then is a sequence in  such that
such that  .
.
Conversely, let be a sequence in such that . Then, for each neighborhood of , there is some  such that
such that  . This means that
. This means that  . Hence, each neighborhood of contains an element of other than .
. Hence, each neighborhood of contains an element of other than .
Corollary 1.1: An element is an accumulation point of if and only if there is a sequence in such that .
Proof: If is a limit point, then the claim follows from Proposition 1.4. Otherwise, if is an accumulation point, but not a limit point of , then there is a neighborhood of such that  . Thus, , and the constant sequence with
. Thus, , and the constant sequence with  for all has the desired property.
for all has the desired property.
We can also characterize closed sets using convergent sequences by simply using the fact that a closed set is the complement of an open set.
Proposition 1.5: For , the following are equivalent:
(i) is closed;
(ii) contains all its limit points;
(iii) Every sequence in , which converges in , has its limit in .
Proof: ‘(i)  (ii)’ Any limit point of is also an accumulation point and so is contained in . Since is closed and Proposition 1.3,
(ii)’ Any limit point of is also an accumulation point and so is contained in . Since is closed and Proposition 1.3,  , and so all limit points are in .
, and so all limit points are in .
‘(ii) (iii)’ Let be a sequence in such that in . Then, by Corollary 1.1, is an accumulation point of . This means that, either is in , or is a limit point of , so, by assumption, .
‘(iii) (i)’ This implication follows from Proposition 1.3 and Corollary 1.1.
Compact Sets
Compact sets are so important since they possess important properties, that are known from finite sets:
- Set is bounded;
- Set contains a maximal and minimal element;
- An infinite sequence contains a constant subsequence.
The famous Heine-Borel Theorem will show that compact sets in metric spaces do indeed have these properties. However, we will only partly prove this theorem but will provide links and references to full proofs.
The analogy is also outlined in this really nice video (in German only) by Prof. Dr. Edmund Weitz.
Let us start with very basic but important definitions.
Definition 1.3 ((Open) Cover and Open Sub-Cover)
By an open cover  of a set
of a set  in a metric space , we mean a collection
in a metric space , we mean a collection  of (open) subsets of such that
of (open) subsets of such that  .
.
A sub-collection  with
with  of an (open) cover is called an open sub-cover of .
of an (open) cover is called an open sub-cover of .
An (open) cover of is a collection of possibly overlapping open sets in which, after considering their union globally, contains the set inside.
Example 1.6 (Real Line)
Let us consider the set  of the metric space . Then,
of the metric space . Then,  is an open cover of because
is an open cover of because  . This cover apparently contains infinitely many open sets
. This cover apparently contains infinitely many open sets  .
.
 is an open subcover of since
is an open subcover of since  but
but  . This subcover, however, still contains infinitely many open sets.
. This subcover, however, still contains infinitely many open sets.
Now we have the ingredients for the central definition of this section.
Definition 1.3 (Compact Set)
A subset  of a metric space is said to be compact if every open cover of contains a finite subcover.
of a metric space is said to be compact if every open cover of contains a finite subcover.
The definition of a compact set contains a very powerful requirement: it requires the existence of a finite open subcover within any possibly infinite open cover. Please also refer to the analogy to the properties of finite sets as mentioned at the beginning of this section.
It is clear that every finite set is compact.
Example 1.7 (Finite Set & Compactness)
Let  be a finite set in the metric space and
be a finite set in the metric space and  . Note that we could chose any for this purpose. Apparently, is a finite and open cover of
. Note that we could chose any for this purpose. Apparently, is a finite and open cover of  .
.
Each point of the finite set is contained in some open set by the cover depending upon that point. This directly implies that there is a finite sub-cover most the size of the set .
Let us generalize the approach taken in Example 1.7 for an arbitrary non-empty set  . By setting
. By setting

with  , an open set
, an open set  is assigned to each point
is assigned to each point  . Hence, the set
. Hence, the set  is an open cover for any set .
is an open cover for any set .
The Heine-Borel theorem states that every closed and bounded set in , is compact. This theorem is very important for analysis, measure theory and beyond.
Theorem 1.1 (Heine-Borel)
Let be a subset of the standard Euclidean metric space  with . Then the following statements are eqivalent:
with . Then the following statements are eqivalent:
(i) is compact;
(ii) is closed and bounded;
(iii) Every infinite subset of has an accumulation point in .
Part of the Proof for :
First, we assume that is compact i.e. that every open cover admits a finite sub-cover. Define  . Then
. Then  simply because the index set is itself and
simply because the index set is itself and  with is a open cover and thus there exist a finite sub-cover
with is a open cover and thus there exist a finite sub-cover  ,
,  ,
,  ,
,  with and
with and  . Note that
. Note that  with
with  . Since this interval is bounded so is .
. Since this interval is bounded so is .
Now, let us assume that is not closed (i.e. complement is open). Then, there must be a limit point of with  since a closed set contains all its limit points [according to Proposition 1.5]. Find
since a closed set contains all its limit points [according to Proposition 1.5]. Find  such that
such that  . Define
. Define  . Apparently, and thus because of the assumption that is compact there must be a finite sub-cover , , , with and . Set
. Apparently, and thus because of the assumption that is compact there must be a finite sub-cover , , , with and . Set  and find a
and find a  such that
such that  (which is possible since
(which is possible since  ). According to the definition of this implies
). According to the definition of this implies  , which is a contradiction. Hence, is closed.
, which is a contradiction. Hence, is closed.
For a general proof of the theorem for please refer to Theorem 3.31 in [1] or see there. Also note that a visualization by the University of Hannover of one proof can be found on YouTube. There is also a proof analysis of one direction of the Heine-Borel Theorem.
Topological Spaces
Topological spaces can be defined in many ways, however, given our focus on metric spaces and open sets the following definition is the most natural one. Please note that we could also use the properties of closed sets to define a topological space.
Definition 2.1 (Topological Space)
A topological space is a pair  , where is a set and
, where is a set and  is a family of subsets that satisfies
is a family of subsets that satisfies
(i) ;
(ii) if for an arbitrary index set ;
(iii) if for a finite index set .
The following video provides a rather unorthodox way of thinking about a topology. However, it might help to get a heuristic for topological spaces. It also mentions the connection between metrics and a topology.
Example 2.1 (Topologies):
a) If is a metric space and  is the set of all open sets, then is a topology according to Proposition 1.1.
is the set of all open sets, then is a topology according to Proposition 1.1.
b) Let be a set and  then
then  is the so-called trivial or indiscrete topology.
is the so-called trivial or indiscrete topology.
c) The power set  of a set is the so-called discrete topology. In this topology every subset it open.
of a set is the so-called discrete topology. In this topology every subset it open.
Continuous Functions, Open and Closed Sets
Now, we connect two important concepts via the following theorem.
Theorem 3.3 (Continuous Functions & Closed/Open Sets):
Let  be a function between metric spaces and
be a function between metric spaces and  . Then the following are equivalent:
. Then the following are equivalent:
(i)  is continuous;
is continuous;
(ii)  is open in for each open set
is open in for each open set  ;
;
(iii)  is closed in for each closed set
is closed in for each closed set  .
.
Proof: ‘(i) (ii)’ Suppose is continuous on and let  be an open set. If
be an open set. If  , then the claim follows from Proposition 1.1 (i). Thus, we suppose that
, then the claim follows from Proposition 1.1 (i). Thus, we suppose that  .
.
Let  . Due to the fact that
. Due to the fact that  is open, we can chose at least one such that
is open, we can chose at least one such that  for every
for every  . Given that is continuous on , a corresponding
. Given that is continuous on , a corresponding  exists such that
exists such that

and  . That is,
. That is,  implies
implies  . Thus,
. Thus,  , which means that is an open set.
, which means that is an open set.
‘(ii) (i)’ Let us suppose that is open whenever is open and we aim to prove that is continuous at each point of . Given and , we know that the ball  is open in . By assumption so is
is open in . By assumption so is  . Since
. Since  and is an open set, there must be a such that
and is an open set, there must be a such that  . This proves the assertion.
. This proves the assertion.
Please also refer to some counterexamples illustrating that the image of an open (closed) set under a continuous function does not need to be open (closed).
Appendix
For all German-speakers, I recommend to listen to the following quite illustrative video about metric spaces and topologies.
In addition, the next video introduces open and closed sets in an illustrative manner.
Literature:
[1]
[2]